
第二届全国SLAM技术论坛成功举办
2019年7月27日-28日,“第二届全国SLAM技术论坛”在清华大学成功举办,本次论坛由中国图象图形学学会主办,三维视觉专委会和清华大学承办,深蓝学院协办。论坛邀请了11位学术界和企业届的专家围绕SLAM技术的研究、发展以及产业化应用作报告分享,吸引了来自全国各地410多位领域爱好者参加此次活动,现场座无虚席,气氛热烈!

图1.论坛现场
7月27日,论坛在中科院自动化所吴毅红研究员的主持下正式拉开帷幕。中国图象图形学学会三维视觉专委会副主任杨睿刚博士代表学会和专委会致辞。在致辞中,杨睿刚博士首先对炎炎烈日下从全国各地到来的参会者表达衷心感谢,对大家关注SLAM等三维视觉领域的热情感动。同时,杨睿刚博士现场通过“单目视物,手指相碰”的小实验,向参会者展示了三维视觉的重要性,以及当下发展的现状和趋势。

图2.杨睿刚博士
作为论坛的第一个报告,北京大学的查红彬老师带来了 “基于数据流处理的SLAM技术”的分享。查老师首先给大家介绍了数据流计算的基本概念,紧接着讲解了基于数据流的SLAM的工作过程:从流(Flow)到预测(Predictor),再到地图构建(Mapping),最后到学习(Learning),并通过具体案例进行了详细讲解。最后,查红彬老师介绍了自己团队所研究的与SLAM相关的方法,如:循环神经网络学习方法(RNN Learning)、基于线流方法(Line Flow)等,其相关工作的研究目标是实现SLAM的非监督在线学习。
图3.查红彬老师作报告
随后,University of Delaware的黄国权老师作题为“State Estimation and SLAM”的报告,为大家分享了他们实验室最近两年的一些实验结果和研究成果。
图4.黄国权老师作报告
下午,香港科技大学的沈劭劼老师给大家带来“Perception and Navigation in Complex Environments – From Drones to Self-driving Cars”报告。报告主要分为无人机和无人车两部分:在无人机方面,沈老师介绍了课题组正在搭建的自主飞行平台,从定位到三维重建、物体跟踪、轨迹规划最后到系统设计,将这些核心技术串起来,让系统能够正常运行;在自动驾驶领域,沈老师介绍了课题组针对无人驾驶技术的一些痛点(包括检测与跟踪的精度、定位的精度、物体行为预测以及规划等)所做的系列工作。
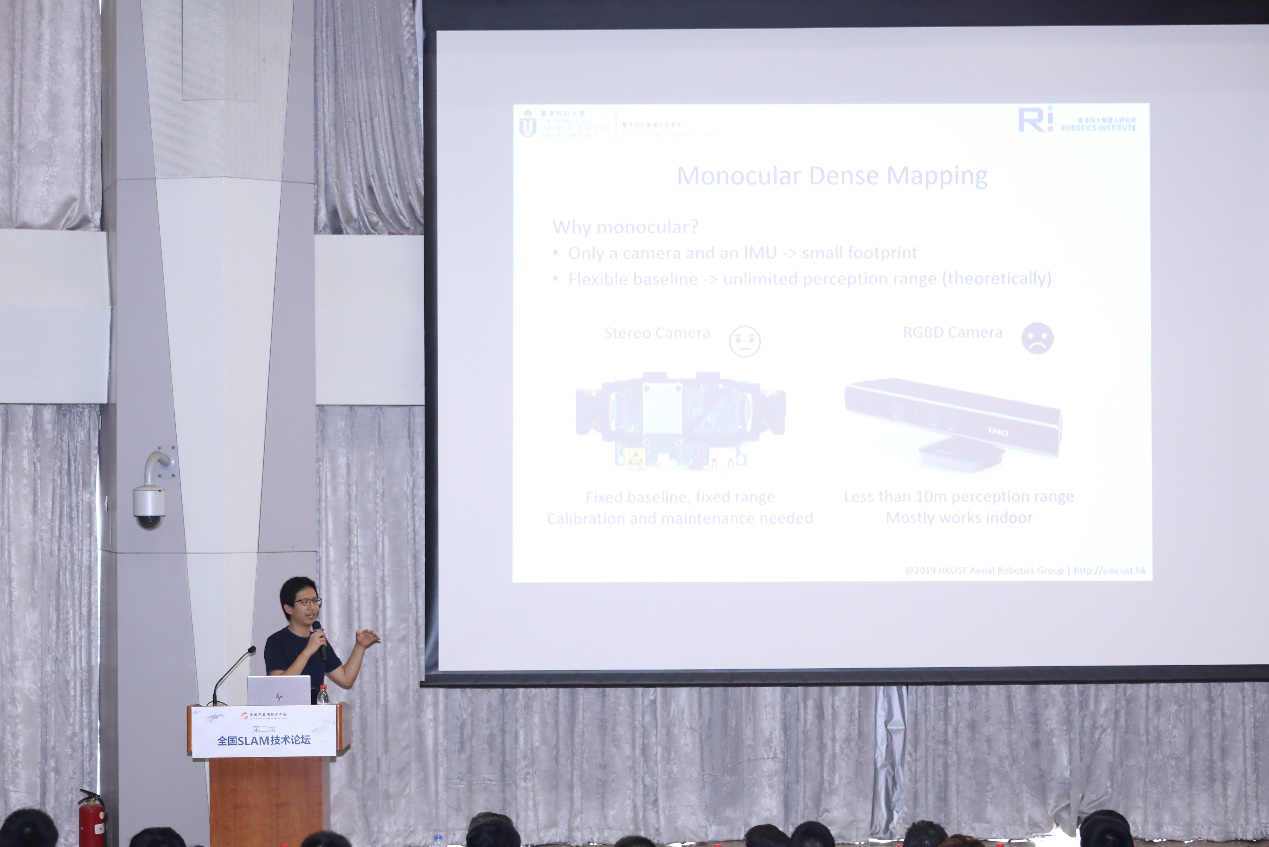
图5.沈老师作报告
接着,厦门大学的王程老师带来了“激光雷达SLAM移动测图”报告,王程老师首先介绍一些关于激光雷达基础的信息,然后介绍了基于深度学习的多线激光扫描SLAM处理,讨论了超体素提取、三维直线提取、建筑语义线框提取、以及对象提取等大规模三维点云处理工作,最后介绍厦门大学激光扫描处理团队在无人驾驶、智慧建筑、森林等领域的应用案例。

图6.王程老师作报告
接下来,图森未来的首席科学家王乃岩博士向大家展示了图森未来无人驾驶卡车发展的历程、目前发展的情况和最新的技术进展,以及SLAM技术在无人驾驶卡车领域中的具体实践和应用。

图7.王乃岩博士作报告
当天嘉宾报告结束后,吴毅红老师、查红彬老师、黄国权老师、沈劭劼老师、王程老师、刘勇老师和戴玉超老师围绕“SLAM技术的未来发展”展开了讨论与互动交流,重点讨论了“多传感器融合”、“线、面等高级特征”的突破点以及挑战。

图8.圆桌论坛I
7月28日上午,浙江大学的刘勇老师带来“多源融合SLAM:现状与挑战”的报告。报告针对目前SLAM在实践应用中面临的多种挑战问题开展介绍,分享目前的技术解决方案和最新进展,重点讲述了多种传感器、多种信息源以及多种特征手段的多源融合SLAM方案。

图9.刘勇老师报告
纵目科技的首席科学家宋宇博士介绍了纵目科技在APA(自动停车辅助)、AVP的产品研发展路线,然后分享了纵目AVP低速无人驾驶环境建模和定位问题,包括传感器配置、SLAM环境建模、深度语义&视觉特征融合地图匹配定位(全局定位&跟踪)、IMU/车速/视觉融合里程计算等方面的技术内容。

图10.宋宇博士报告
随后,西北工业大学的戴玉超老师带来题为“基于深度学习的多视角几何:从监督学习到无监督学习”的报告,报告涵盖了“如何在监督学习框架下实现单目深度估计、双目深度估计”,“如何构建无监督学习框架以实现连续视频帧双目深度估计、具有几何约束的单目光流估计、多目深度估计和双目-激光雷达数据的有效融合”等研究工作。

图11.戴玉超老师报告
紧接着,镭神智能创始合伙人雷祖芳详细介绍了激光雷达的三大技术原理,以及基于雷达和SLAM技术在机器人中的应用实践,并对镭神智能的整体情况做了介绍。

图12.雷祖芳老师报告
下午,大连理工大学庄严老师作题为“室外移动机器人视觉里程计与激光里程计研究进展”的报告,介绍了实验室基于滑动窗口的相机在线辐射校准及单目稀疏视觉里程计方向的研究进展,以及移动机器人基于激光点云的实时场景理解方向的最新成果,讨论了将激光点云实时语义分割与激光里程计相结合的关键技术与初步进展。报告最后对激光-视觉融合的里程计研究中的重点与技术发展趋势进行了初步探讨。
图13.庄严老师报告
随后,悉见科技CTO郑思遥简要介绍了人类在AR技术上的探索以及AR大规模落地应用所面临的巨大挑战,最后,介绍了团队如何通过计算机视觉相关的技术,包括SLAM技术、三维重建技术、深度学习技术等核心技术推进AR技术的大规模落地应用。

图14.郑思瑶博士报告
两场报告后,论坛进行了最后两个圆桌论坛。“SLAM技术与应用落地”的圆桌,由庄严老师主持,邀请镭神智能的雷祖芳、图森未来的赵季、纵目科技的宋宇、悉见科技的郑思遥作为嘉宾。嘉宾们站在自身行业的角度分享了SLAM技术的重要性,以及对SLAM技术的实时性、精度和鲁棒性的要求,同时分享了对于招募SLAM技术人才的思考。

图15.圆桌对话II
清华大学博士高翔主持了“SLAM技术入门与进阶”的圆桌对话,邀请了中科院自动化所博士贺一家、北京航空航天大学博士生邱笑晨、哈尔滨工业大学博士生权美香、美国伊利诺伊大学硕士石成玉作为嘉宾。嘉宾们各自回忆了自己当初学习SLAM时的方法、心得以及经验教训,并对视觉SLAM的实际落地应用阐述了自己的看法。

图16.圆桌对话III
两天的论坛,日程安排紧凑,意犹未尽之时,已接近尾声。吴毅红老师代表主办方和承办方,感谢与会嘉宾的精彩分享和各位参会者的热情,以及图森未来、镭神之能、纵目科技、悉见科技、小觅智能、擎朗智能、小鹏汽车、石头科技、追觅科技等9家企业对论坛的大力支持。

图17.吴毅红老师总结
11位报告嘉宾分别从科研和产业应用的角度切入,向与会者介绍了SLAM、激光雷达、无人驾驶和无人机等的发展以及实践。3个圆桌论坛分别从SLAM技术发展、应用落地、入门进阶3个角度切入,为大家分享了精彩的观点。通过报告间隙与嘉宾们的交流,参会人员也收益颇多。
第二届全国SLAM技术论坛,在中国图象图形学学会各位领导、各位专家、广大老师和企业的大力支持下,圆满结束。
 图18.全国SLAM技术论坛参与人员合影
图18.全国SLAM技术论坛参与人员合影